

PilotPal. From the Greek βοηθός — the one who runs toward the call. The helper. The second pair of hands on a long afternoon.
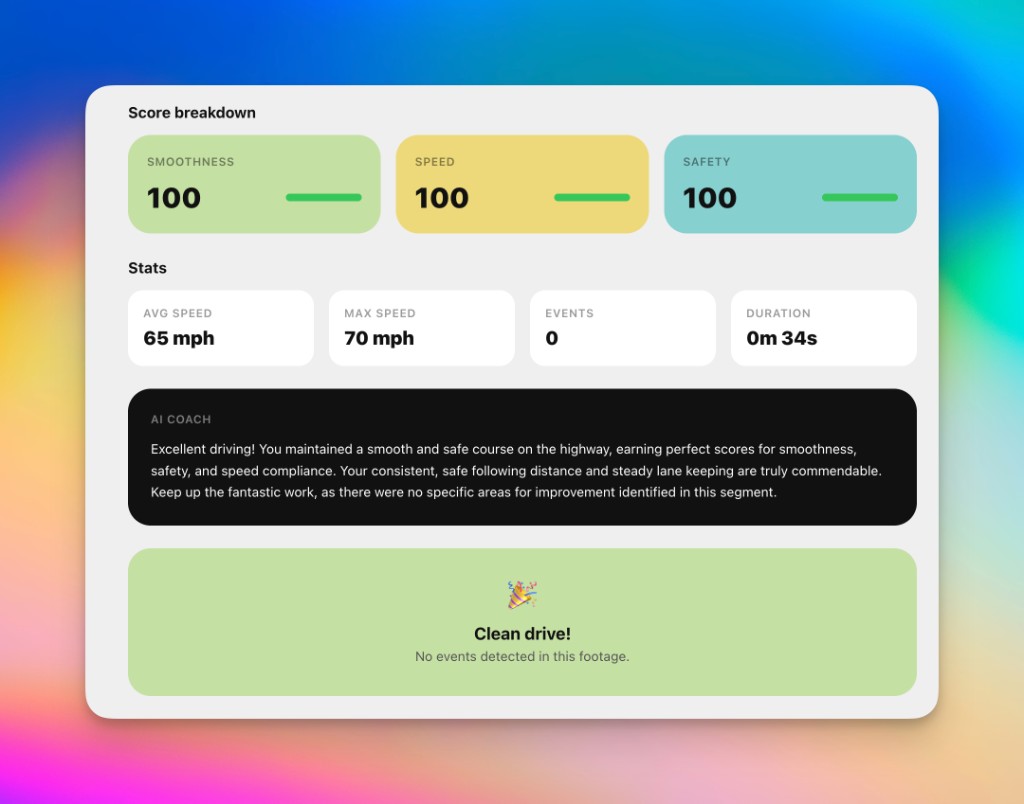
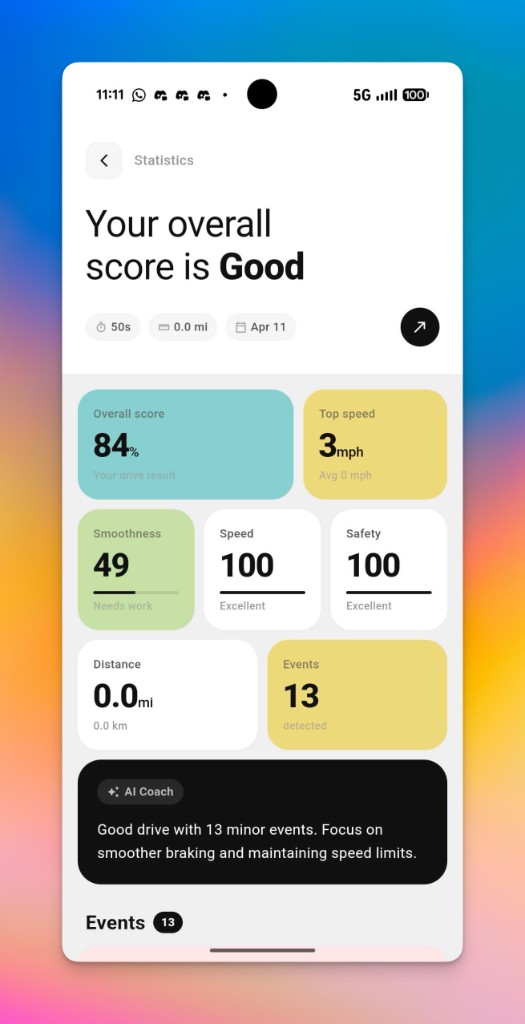
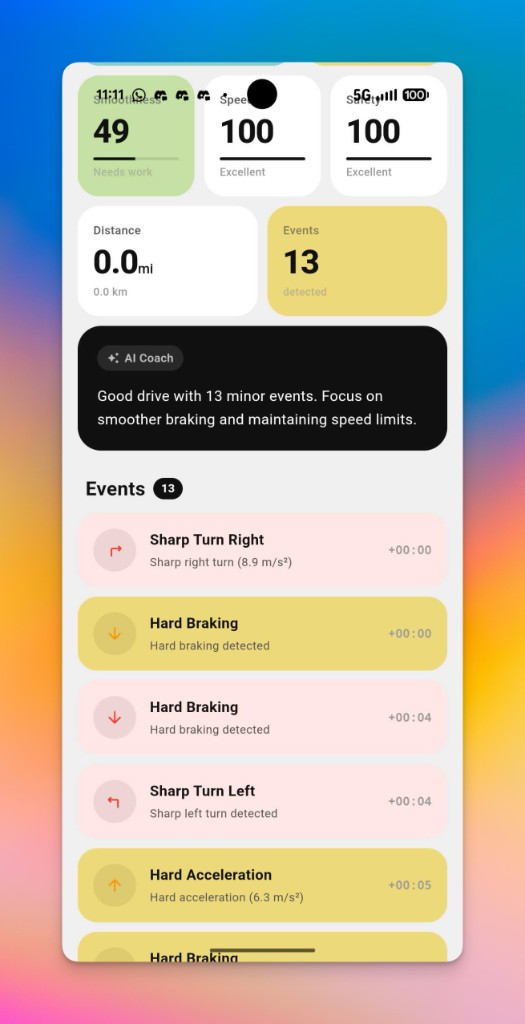
We believe the cabin is sacred: eyes forward, hands steady, mind as clear as the road allows. The best co-pilot is the one that speaks only when it matters — that turns telemetry into care, not noise, and hands you a clear story when the engine stops.
We are tired of dashboards that scream. Of scores that shame without teaching. Of tools that forget the human at the wheel is trying to get home safe.
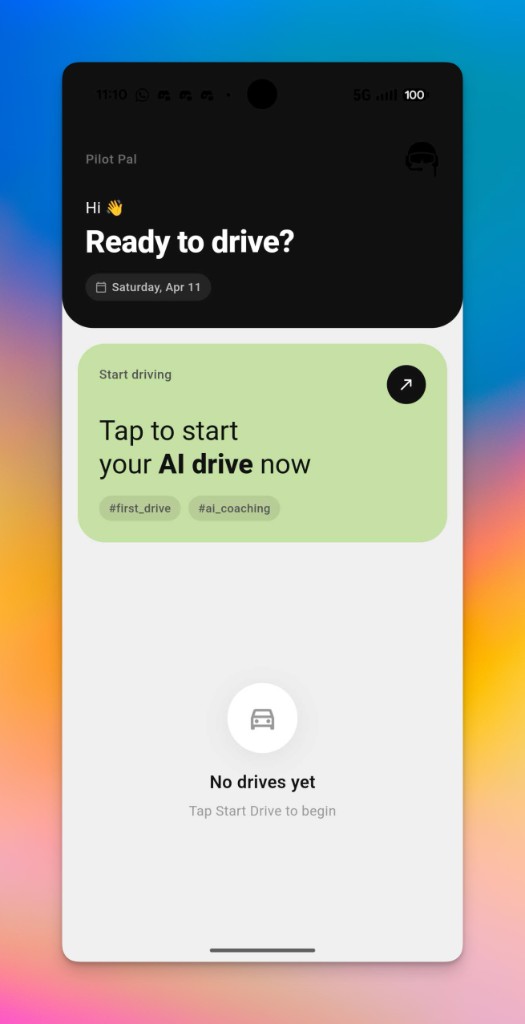
No clutter. No guilt trip. No second screen to manage at 70 mph. Your drive is the interface.